Eine neue Variante meiner „Flux“-Copter: Der Flux-11, mit Doppel-Kamerasystem. Ausgestattet mit einer Wärmebildkamera sowie einer normalen Kamera.
Hier ein Beispielbild der Wärmebildkamera: So sieht der Pilot aus der Luft aus:

Für eine bessere Übersicht ist zunächst eine „RunCam NighOwl“-Kamera installiert. Als Wärmebildkamera kommt zusätzlich eine „Seek Thermal Reveal Pro“ zum Einsatz (Thermo-Sensor mit 320×240 Pixel, -40 bis +330°C, Reichweite bis 550m). Leider haben die Seek-Kameras keinen AV-Ausgang, so dass für die Bildübertragung sogar noch eine dritte Kamera an Bord ist: Eine Fatshark PilotHD filmt den Bildschirm der Seek ab und sendet das Bild auf den Kontrollmonitor am Boden.

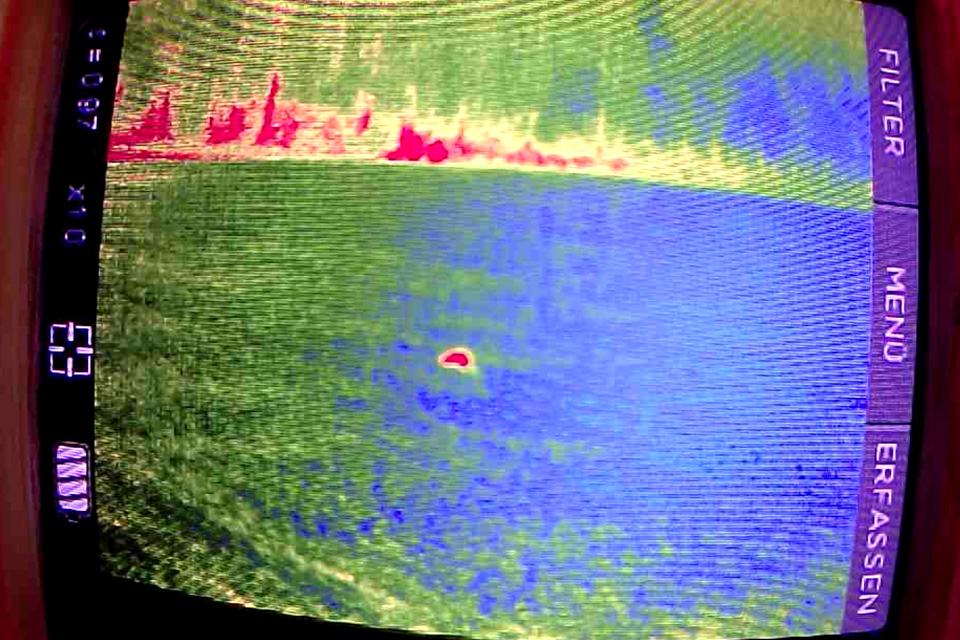
Und hier ein weiteres Demobild: Der rote Fleck in der Mitte ist ein Hund auf der Wiese.
Die Kameratechnik im Detail (montiert in einem FluGi-Gimbal mit Basecam-Steuerung): ganz rechts die Seek Thermal Reveal Pro (hochkant montiert). Links angebaut ein Konus, der die Fatshark-PilotHD (silbernes Gehäuse, teilweise noch sichtbar) über dem Bildschirm fixiert und Fremdlicht abhält. Davor, ca. in der Mitte unten, die RunCam NightOwl, die auch bei schlechten Lichtverhältnissen noch ein „normales“ Kamerabild liefert und zusätzlichen Überblick schafft.

Und hier die ganze Konstruktion von oben. Bisher nur provisorisch verkabelt und teilweise nicht lackiert, da sich alles noch im Prototypen-Stadium befindet.
